Zīmēšanas robots mājas apstākļos pirmais cēliens.
Gala rezultātam vajadzētu izskatīties tādam kā raksta apakšā pirmais video.
šis projekts tiek taisīts pilnībā no nulles,pagaidām tikai tāda skice.Projekta gaitā tiks uzlabota un pārtaisīta shēma uz maketplates, tiks rakstīta vadības programa pirkeš arduino un arī informācijas sūtīšanas programma datoram, kā arī tiks veidota mehānika ar kura arī izpildīt zīmēšanu. Kā arī tiks izskaidrots viss sīkāk, lai visiem būtu saprotams un spētu mājās būvēt līdzi :D .
Tātad šis būs interaktīvais projekts, gaidīšu atsaucību no jūsu puses, ja šis raksts dabūs 150 pozitīvus vērtējumus tad projekts tiks turpināts līdz nākamajam cēlienam, bet ja šis raksts nesaņems 150 pozitīvus vērtējumus tad projekts netiks pabeigts.Tai vietā būs pavisam cits projekts. Cerams kad jums patika raksts un gribēsiet redzēt turpinājumus.
Paldies par uzmanību, atvainojos ja bilžu un video kvalitāte neatbilst jūsu vēlmēm, nākamreiz centīšos sagādāt kvalitatīvākas bildes.
Vsipār jau vēlējos kodu likt pēc bildēt bet nu tas laikam nebūs iespējams tapēc tiks likts augšā
Šis ir parasts kods kas mūžīgi grieš motorus, vēlāk būs integrēta vadība no datora
Ja tiek izmantoti mazjaudīgi tranzistori ieteiktu likt motora apgriezienus mazākus.
Šeit būs arduino kods :
#include //Pievieno pie projekta stepera bibliotēku
#define STEPS 48 //stepera morora soļu daudzums
Stepper stepper1(STEPS, 13, 12, 11, 10); //definē 1.stepera slēgumu
Stepper stepper2(STEPS, 9, 8, 7, 6); //definē 2.stepera slēgumu
Stepper stepper3(STEPS, 5, 4, 3, 2); //definē 3.stepera slēgumu
void setup() // definēšans cikls, definē motora ātrumus
{
stepper1.setSpeed(100); //definē 1.steppera apgriezienus minūtē
stepper2.setSpeed(100); //definē 2.steppera apgriezienus minūtē
stepper3.setSpeed(100); //definē 3.steppera apgriezienus minūtē
}
void loop() // programmas cikls kas kontrolē stepera motora griezšanos
{
stepper1.step(0); //1.stepera motoru griezšanas parametrs (0 nozīmē kad motors negriežās)
stepper2.step(-1);//2.stepera motoru griezšanas parametrs (-1 nozīmē kad motors griezīsies atpakaļ)
stepper3.step(1); //3.stepera motoru griezšanas parametrs (1 nozīmē kad motors giezīsies uz priekšu)
}
Zīmēšanas robots mājas apstākļos pirmais cēliens.21
89
0
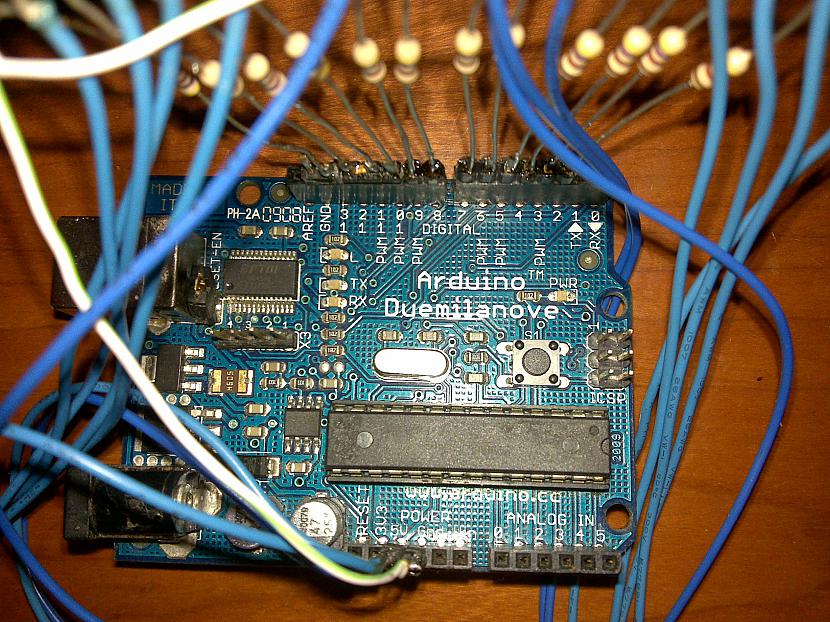
Tā kas būs nepieciešams šim projektam 1. arduino

būs vajadzgi 3 unipolārie steppermotori (bipolāros no unipolārajiem var atšķirt pēc vadu daudzuma unipolārajiem ir 5 vai 6 vadi , bet bipolārajiem ir 4)
Reklāma

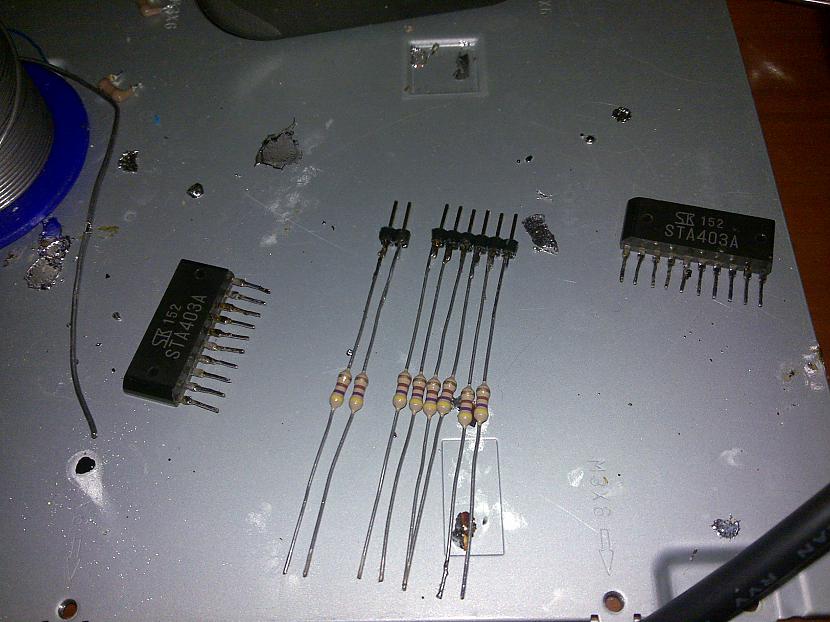
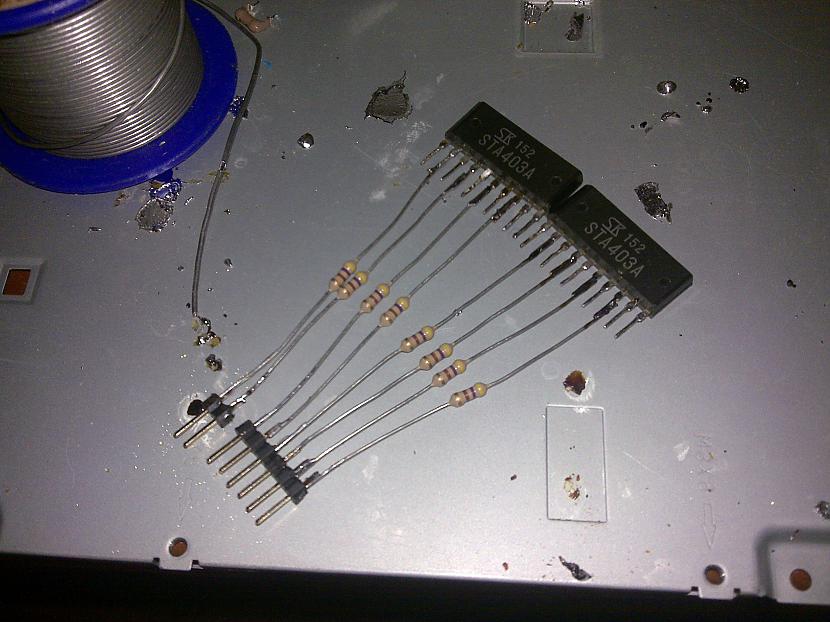
tad vel būs šādi tādi sīkumi,12 rezistori,12 tranzistori un 12 spraudņīši.
rezistoru vērtības var būt no 470 omiem līdz 1 kilomam(es izmantoju 470 omus), tranzistoriem jābūt NPN tipa var arī izmantot darlingtonu(es izmantoju sta403a tranzistoru, kura korpusā ir 4 NPN darlingtoni)
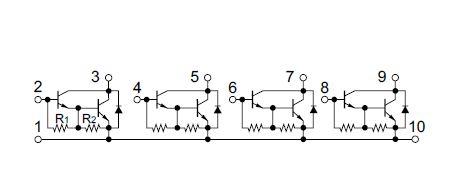
tātad te var redzēt kad ir 4 darlingtoni, un no emitera uz kolektoru aiziet diode(šis ir sta403a tranzistors izmantoju viņu tapēc kad ļoti vienkārši saslēgt)
šī ir shēma pēc kuras ir jālodē, ja izmanto tranzistorus tad vajdzētu likt diodi uz motora spoles, ja izmanto sta403a tranzistorus tad nav obligāti jāliek diode, tā saku jo nebija pie rokas 12 diodes, ielikšu vēlāk. par shēmu sīkāk nestāstīšu jo ganjau sapratīsiet paši
Reklāma
un tagad ķeramies pie jautrākā, tas ir pie lodēšanas, sākumā salodējam rezistorus pie konektoriem,
tad pielodējam pie tranzistoriem, ja tiek izmantoti tranzistori kuri atseviškos korpusos tad lodējam kopā visus emiterus un lodējam pie mīnusa, nelodēt kopā bāzes vai kolektorus , kolektori būs jālodē pie stepera, un bāzes pie vadības rezistoriem
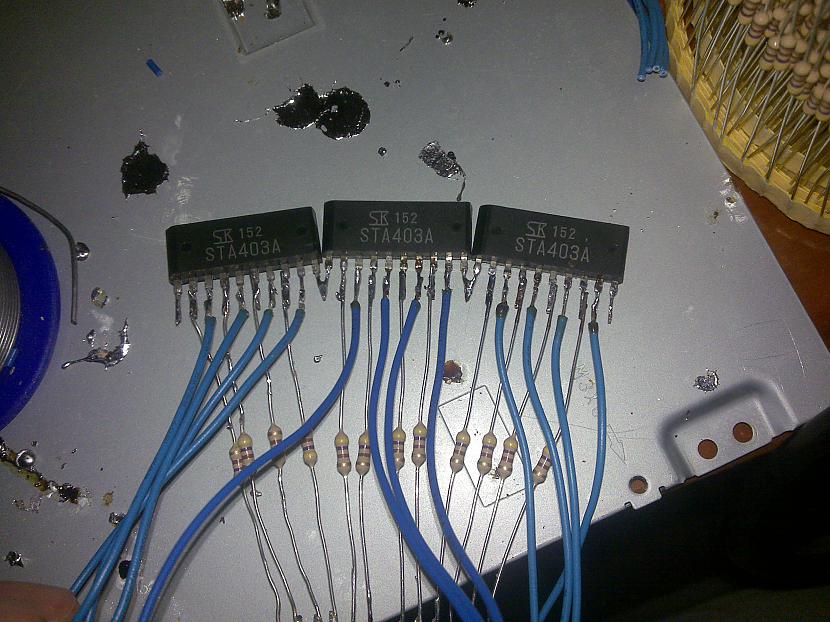
tātad šeit redzams kā ir salodēts
Reklāma
manā gadījumā bija nepieciešams pielodēt vel tranzistoru kolektorus pie mīnusa, tā pāreja nebija obligāta jo pēc shēmas jau šī pāreja ir ietaisīta mikroshēmā. un vel kas ir svarīgi tas ir steperu kopējā spoļu kāja tiek lodēta pie plusa
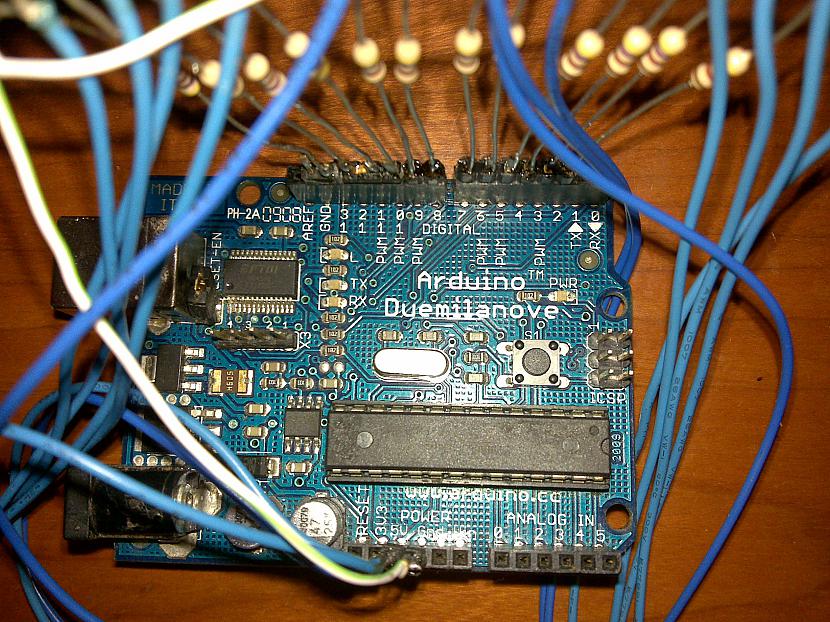
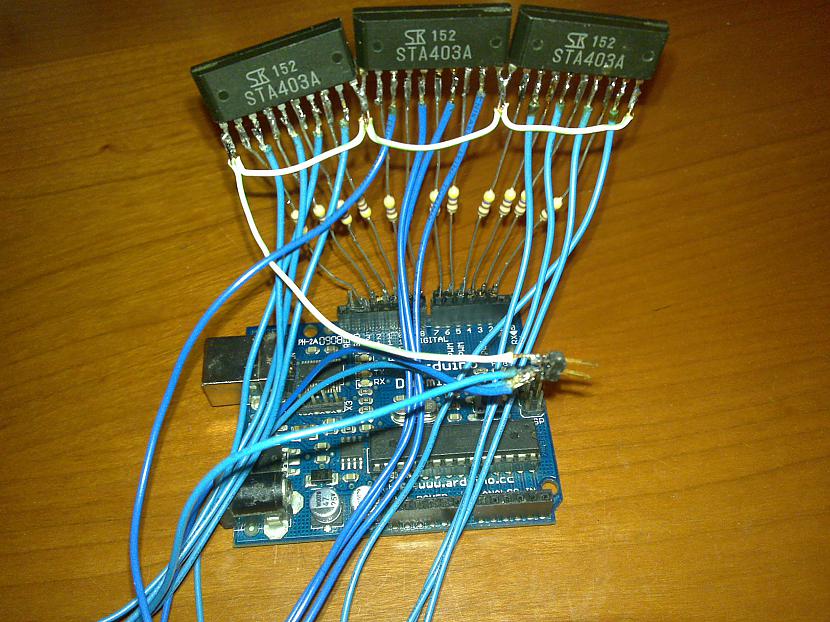
šeit var redzēt kaa vis ir savienots
Tev patiks šie raksti






